SISTEMI ZAŠTITE

Bulevar Arsenija Čarnojevića 166,
Novi Beograd

Pozovite nas za konsultacije
011 40 64 100
061 66 31 555
Bulevar Arsenija Čarnojevića 166,
Novi Beograd
Pozovite nas za konsultacije
011 40 64 100
061 66 31 555
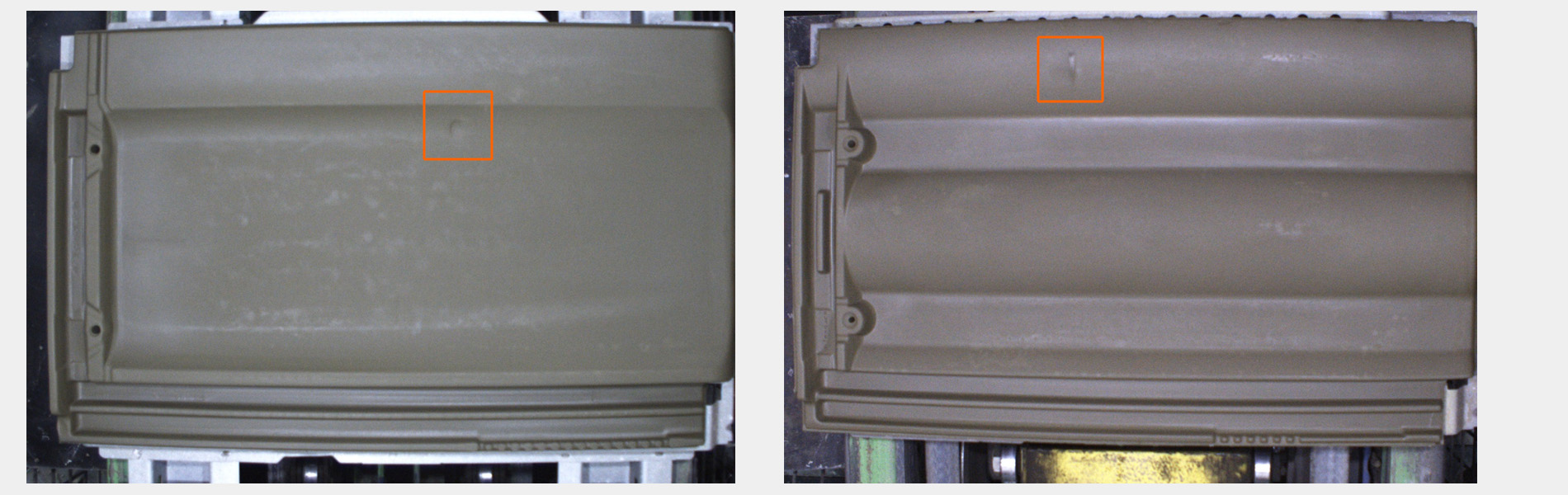
Površinske greške predstavljaju odstupanja teksture i boje materijala od referentnih vrednosti. Automatizacija prepoznavanja ovih odstupanja u realnom vremenu, dok se proizvod kreće na traci je metod ubrzavanja proizvodnje i eliminisanje faktora ljudske greške. Ovakva vrsta kontrole proizvoda onemogućava ulazak škarta u pakovanje gotovog proizvoda i dospevanje takvog proizvoda do kupca. Automatskom vizuelnom kontrolom proizvoda smanjuju se manipulativni troškovi nastali prilikom reklamacije, čuva renome proizvođača i smanjuju ukupni troškovi proizvodnje. . Automatizacija proizvodnje sa ovakvim sistemima se podiže na maksimum uvođenjem mašinskog vida, kao mehanizma eliminacije škarta u proizvodnji.
Performanse sistema akvizicije slika proizvoda moraju biti takve da mogu ispratiti brzinu trake i obezbediti blagovremenu reakciju sistema detekcije na grešku. Industrijske kamere koje se koriste za detekciju greške moraju imati dovoljnu brzinu snimanja koja može ići i preko 200 frejmova u sekundi. Osvetljenje mora biti sinhronizovano sa trenutkom okidanja kamere i takvih karakteristika da ne izaziva odsjaj i slične smetnje koji mogu ometati proces prepoznavanja greške.
Ekspozicija slike treba da bude što kraća, a svetlosni impuls što većeg intenziteta kako bi se postigla neophodna oštrina slike i dovoljna osvetljenost. Pri osvetljavanju sjajnih površina mora se koristiti polarizacioni filter koj smanjuje refleksiju na najmanji mogući nivo.
Sistem pozicioniranja je bitan kako bi se obezbedilo sinhronizovano snimanje u trenutcima kada je proizvod u kadru kamere. Ovo se može vršiti pomoću fotoćelija, kapacitivnih i induktivnih senzora. Izbor uređaja za pozicioniranje zavisi od samog proizvoda i neophodnosti snimanja proizvoda na istom mestu na slici.
Detekcija površinskih grešaka može biti ozbiljan posao u slučaju nepostojanja negativnih uzoraka sa greškama, u tom slučaju postoje tehnike koje se koriste kako bi se obezbedila pouzdana detekcija greške. Najefikasnija metoda je metoda pozitivnog uzorka, gde se koristi veoma veliki broj slika bez greške i vršiti procena odstupanja uzorka od zadatog šablona.
Za ove svrhe se koriste utrenirane konvolucijske neuralne mreže. U procesu treniranja unosi se što veći broj slika, koje softver za mašinsko učenje upoređuje međusobno i na taj način formira neuralnu mrežu kroz koju se propuštaju slike uzoraka sa proizvodne trake i procenjuje njihovo odstupanje od utrenirane neuralne mreže i tako određuje verovatnoća greške. Procenat tačnosti procene direktno je proporcionalan količini slika korišćenih u procesu treniranja modela.
Ako za treniranje modela imamo određenu količinu slika sa greškama, to doprinosi lakšem treniranju modela, jer pored pozitivnih slika, vršimo i treniranje modela sa negativnim uzorcima. Ovim postupkom brže dolazimo do utreniranog modela. Prilikom treniranja modela takođe se vrši modifikacija unetih slika, tako što se u slike unose varijacije u osvetljenju, boji, veličini i položaju detalja. Ovime se postiže veća tolerancija modela na promene pozicije uzorka u odnosu na kameru, kao i varijacije o osvetljaju.






